Асбоби автоматии ченкунии фаъол
Аризаи маҳсулот
Назорати пешгӯии системаи тағйирпазире, ки ба назорати пешгӯишаванда татбиқ мешавад, ин муттаҳид кардани андозагирӣ ва коркард дар коркард барои ташкили системаи ченкунии пӯшида барои назорати ҳолати коркарди асбоби мошинсозӣ ва таъмини мавҷуд набудани системаи идоракунии коркарди партовҳо мебошад. Назорати фасеҳи асбоби мошинро бо контроллер дар системаи ҳадди ақали даври пӯшида, ки қобилияти коркард ва ченкунии пас аз коркард ба даст овардааст, ба даст овардан мумкин аст. Асбоби ченкунӣ бо компютер, алоқаи минбаъда бо мошини болоӣ ва мошини поёнӣ метавонад идоракунии умумии ягонаи хатти автоматиро амалӣ кунад. Пас, шумо метавонед бе коркарди партовҳо як хатти хеле самараноки истеҳсолии автоматӣ созед. Илова бар ин, сенсорҳои гуногун, ки ба объектҳои берунии гуногун мувофиқанд, метавонанд кафолат диҳанд, ки тамоми система аз таъсири беруна таъсир нарасонад.
Раванди банақшагирии ченкунии фаъол Ҳангоми коркард, дастгоҳи ченкунӣ дар вақти дилхоҳ қисмати корро чен мекунад ва натиҷаҳои андозагириро ба контроллер ворид мекунад. Дар пункти сигнали пешакй мукарраршуда контролер барои идора кардани кори дастгох сигнал медихад. Масалан, дар раванди дастос, ғизои суфтакунии дағал, вақте ки нуқтаи сигнали андозаи аввал, контроллер сигнал медиҳад, асбоби дастӣ аз дастоскунии дағал ба суфтакунии нозук мегузарад, вақте ки нуқтаи сигнали андозаи дуюм, асбоби дастӣ аз ғизои дастоскунии майда ба суфтакунии сабук мегузарад (бе суфтакунии шарора), вақте ки нуқтаи сигнали сеюм, порчаи кориро ба ҳолати пешакии муқарраршуда бармегардонад, чархи коркардро ба ҳолати пешакии муқарраршуда зуд бармегардонад.
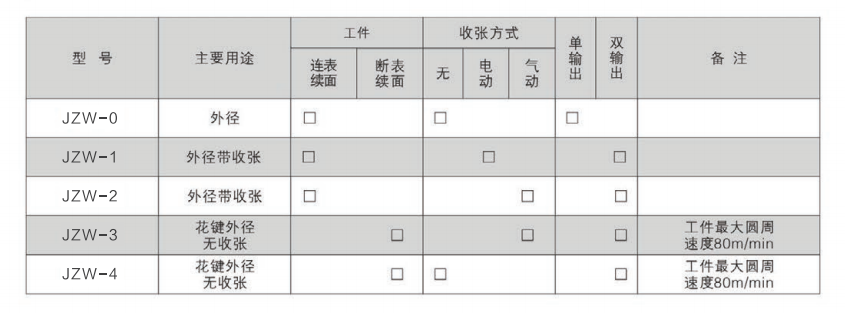
Параметри маҳсулот
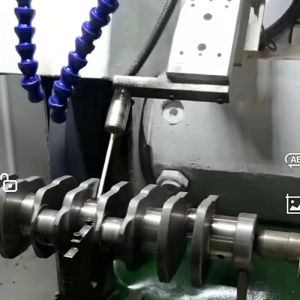
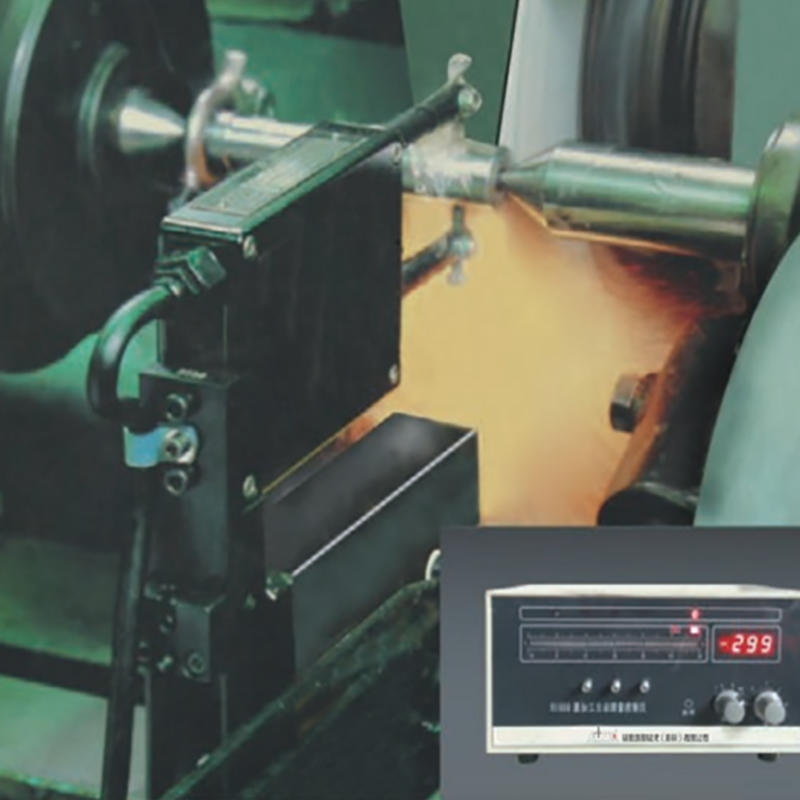
Видеои маҳсулот

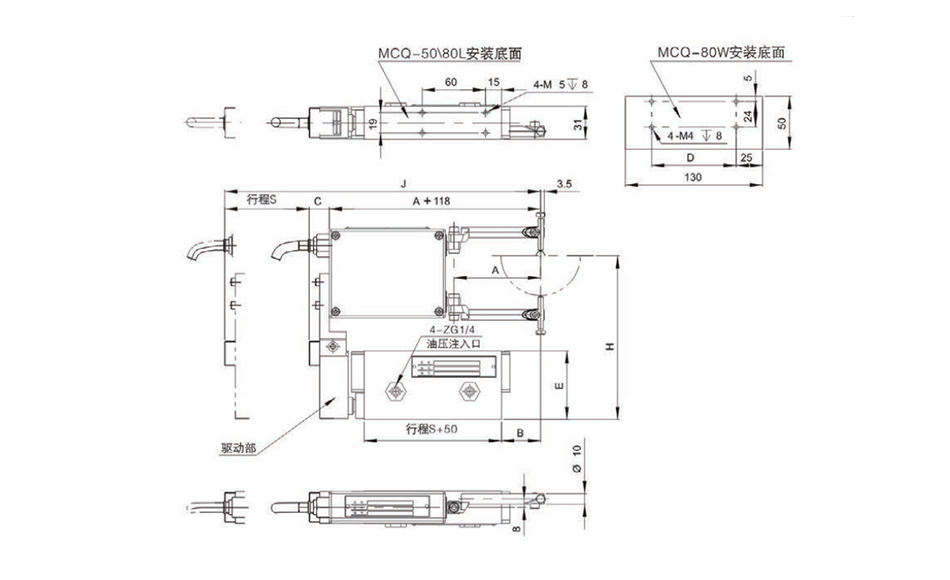
Андозаи маҳсулот